基于视觉的机器人端到端抓取系统实习复盘
围绕水下作业场景中的目标识别、点云处理、抓取位姿估计、手眼标定与系统自动化集成,对实习期间参与的机器人视觉抓取项目做一次更完整的项目复盘:既保留方案演化和踩坑过程,也尽量适合简历和面试展示。
这篇内容由实习期间的 Notion 笔记、阶段总结和工作周报整理而来。和原始笔记相比,这一版尽量保留项目推进过程:包括最开始的方案设想、为什么中途换路线、做过哪些尝试、踩过哪些坑,以及最后怎样把系统逐步跑通。相比只保留结论,我更想把这段经历写成一篇真正能看出“项目是怎么做出来的”的复盘。
一、项目概述
这段实习主要围绕一个基于视觉的机器人抓取系统展开。项目场景偏工程落地:机器人需要在水下作业相关场景中,对固定物体或特定目标完成识别、定位、抓取与装配辅助。
从任务定义上看,核心问题并不只是“识别物体”,而是要完成下面这条完整链路:
- 相机采集图像或 RGB-D 数据
- 识别目标物体
- 重建或提取目标点云
- 计算合理的抓取面和抓取位姿
- 通过手眼标定把视觉结果转换到机械臂坐标系
- 输出机械臂可执行的末端位姿
也就是说,这不是一个单独的识别项目,而是一条从视觉感知 → 几何处理 → 坐标变换 → 机械臂执行串起来的系统工程。
二、如果先用一句话概括我做了什么
如果从职责角度压缩,这段实习里我主要参与了四部分工作:
1. 抓取方案调研与路线选择
前期调研了多种 2D / 3D 抓取与分割方法,包括:
- GraspNet Baseline
- Graspness
- EconomicGrasp
- E3GNet
- Contact-GraspNet
- Grounding DINO
- SAM / EfficientSAM / MobileSAM / EdgeSAM
最开始想直接利用现成 6D 抓取模型完成目标抓取,后面发现“能输出抓取候选”并不等于“能抓到任务里真正想抓的那个面”,于是逐步把路线调整成“目标检测 / 分割 + 点云几何分析 + 姿态估计”的组合方案。
2. 点云抓取面提取与姿态估计
围绕目标点云的局部表面提取,参与实现和调试了:
- 点云滤波 / 下采样
- 法向量估计
- DBSCAN / 距离聚类
- RANSAC 平面拟合
- PCA 主方向与法向提取
- 抓取面筛选与姿态估计
这部分的目标,不是只输出一组“看起来能抓”的 grasp,而是更明确地找到最适合机械爪接近的那个局部平面。
3. 手眼标定、坐标变换与机械臂联调
项目里还参与了:
- 单目 / 双目视觉场景下的手眼标定流程学习与测试
- 相机坐标系到机械臂基底坐标系的转换整理
- 机械臂姿态控制相关接口联调
- 欧拉角顺序、末端姿态方向等问题排查
- 水下视觉场景中的标定误差分析
4. 系统工程化与自动化升级
除了算法部分,还做了一些比较偏工程落地的事情:
- 抓取流程一键启动
- 标定模块重构
- 文件路径自动传递
- 标定类型自动识别
- 后台进程管理
- 模块文档 / 使用文档整理
- 从纯人工交互流程升级为“自动推荐 + 人工确认”的双模式流程
如果从结果上看,这段实习不只是“调了几个模型”,而是逐步把一条原本比较分散的抓取流程往可运行系统推进。
三、项目真正要解决的是什么问题
从项目视角看,真正需要解决的是两个问题。
1. 如何识别目标物体并提取抓取位姿
最终需要得到的不是简单的类别标签,而是:
- 目标在哪里
- 目标上哪个面更适合抓
- 机械爪应该从什么方向接近
- 最终抓取点和姿态是什么
2. 如何把视觉结果稳定转换成机械臂可执行位姿
即使视觉侧已经得到了抓取点和法向量,如果没有完成下面这些步骤,整个系统依然不能闭环:
- 手眼标定
- 相机坐标系到机械臂基底坐标系的转换
- 姿态表示统一(旋转矩阵 / 欧拉角顺序)
- 机械臂控制接口联调
所以这个项目的真正难点不是某一个算法模块,而是整条链路能不能稳定跑通。
四、前期调研:为什么一开始会考虑通用 6D 抓取模型
项目初期,最直观的想法其实是直接使用现有的抓取检测模型,从图像或点云中直接输出 6D 抓取姿态。
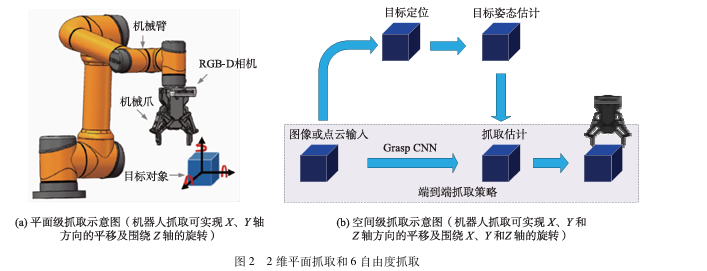
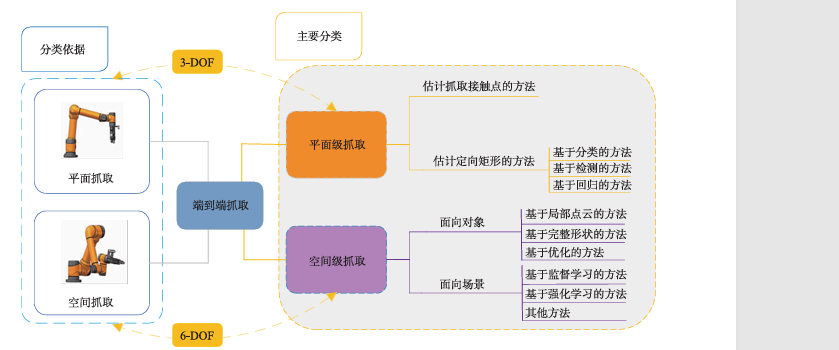
从调研过程看,抓取方法大致可以分成:
- 平面级抓取:估计抓取接触点或定向矩形
- 空间级抓取:面向对象或面向场景的 6D 抓取
这里也整理过一批典型方法,包括:
- GPD
- PointNetGPD
- GraspNet Baseline
- Graspness
- EconomicGrasp
- E3GNet
- Contact-GraspNet
- Scale Balanced
- ZeroGrasp
之所以一开始会考虑 EconomicGrasp / GraspNet 这类方法,主要是因为:
- 有开源实现
- 能直接输出抓取候选
- 在公开数据集上效果不错
- 如果能跑通,理论上可以减少很多几何后处理步骤
其中,EconomicGrasp 比较吸引人的地方在于它更轻量、工程成本也相对友好;而 GraspNet / Graspness 这类工作则更偏经典 6D 抓取基线和强基准路线。
五、第一轮现实反馈:现成 6D 抓取模型为什么不够用
真正跑到实际目标时,问题很快暴露出来。
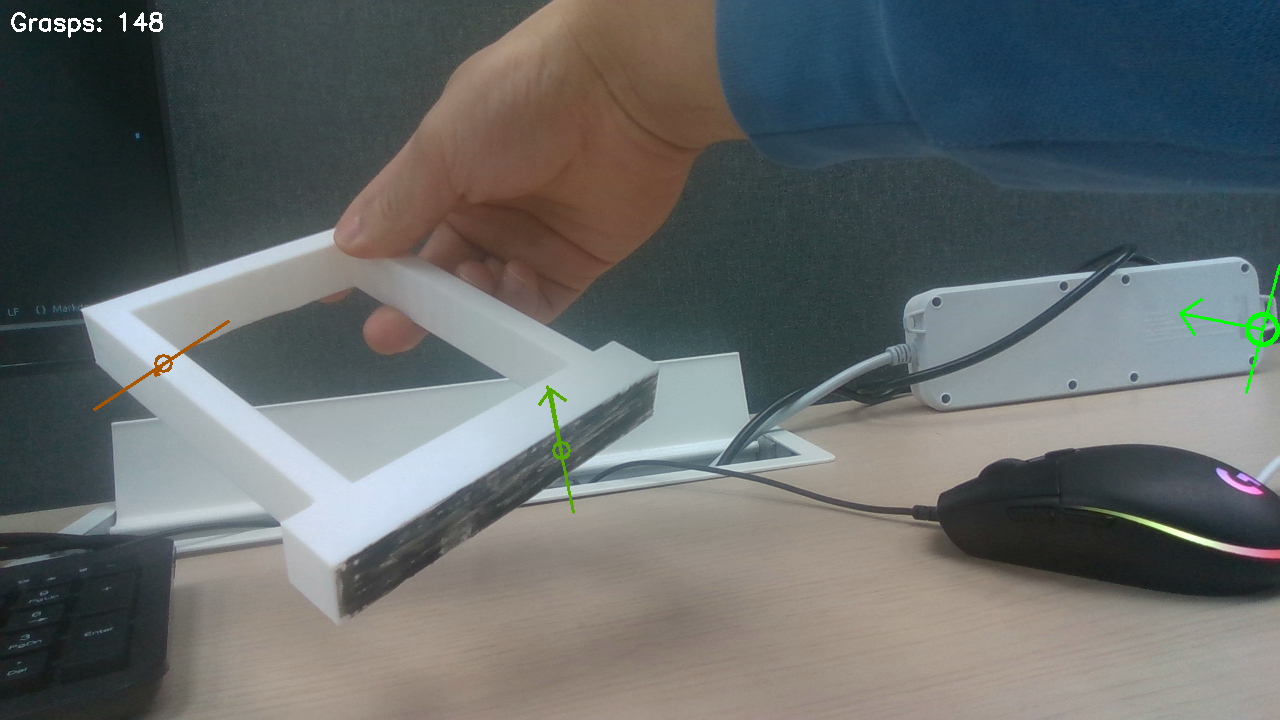
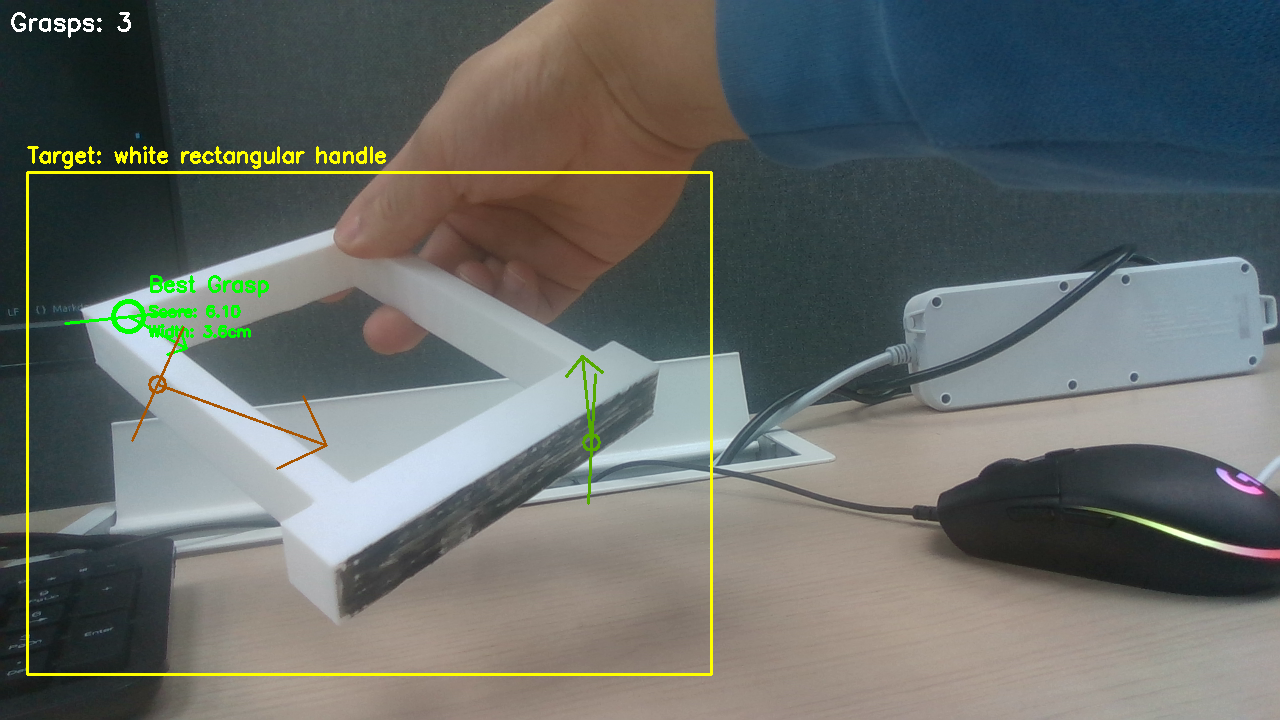
项目里更关心的并不是“任意抓一下”,而是抓取特定目标物体的特定表面。例如白色把手这种目标,希望机械爪从更合理的前端面或目标面接近,而不是从边缘随意夹取。
这时通用 6D 抓取模型常见的问题就出来了:
- 输出的是一组“可抓”候选,而不是“任务上最想抓的那个位姿”
- 模型训练分布和当前场景差异很大
- 对特定物体、特定抓取面、特定接近方向的约束不够强
更具体一点说,公开抓取数据集里很多目标更像桌面物体抓取,模型更擅长回答“哪里能夹住”,但并不真的理解“这个任务里应该从哪个面抓才合理”。
这意味着:
仅靠通用抓取模型,并不能稳定解决“目标导向抓取”问题。
这个判断其实很重要。因为项目后面的很多路线调整,都是从这里开始的。
六、问题转向:从“直接抓取检测”改成“目标导向抓取”
后面逐渐明确了一件事:
如果目标只有一个特定把手或特定部件,那么重点不只是检测 grasp,而是先准确锁定目标,再在目标局部空间里求理想抓取位姿。
于是整体思路开始转向两阶段:
- 先通过目标检测 / 分割把目标从复杂背景中分出来
- 再在目标局部空间里做抓取面提取和位姿估计
这也是后面为什么会把更多精力放在:
- SAM
- Grounding DINO
- 点云分割与平面拟合
- 法向量分析
- 人机交互与自动化筛选
而不是继续死磕“一个模型端到端全包”。
七、围绕特定目标抓取做过哪些尝试
7.1 人工框选、模板匹配这类朴素方案
一开始也尝试过更直接的路线,例如:
- 人工框选
- 特征提取
- 模板匹配
但后面没有继续深入,原因主要是:
- 对目标尺度和旋转敏感
- 泛化能力差
- 在复杂场景里鲁棒性不够
所以这条路线更多停留在快速验证层面,没有作为最终方案。
7.2 为什么选择 Grounding DINO + SAM 路线
前期调研时大致看了两条路:
- 有样本方案:例如 YOLO / FastSAM 这类需要数据集训练的路线
- 无样本方案:例如 Grounding DINO + SAM
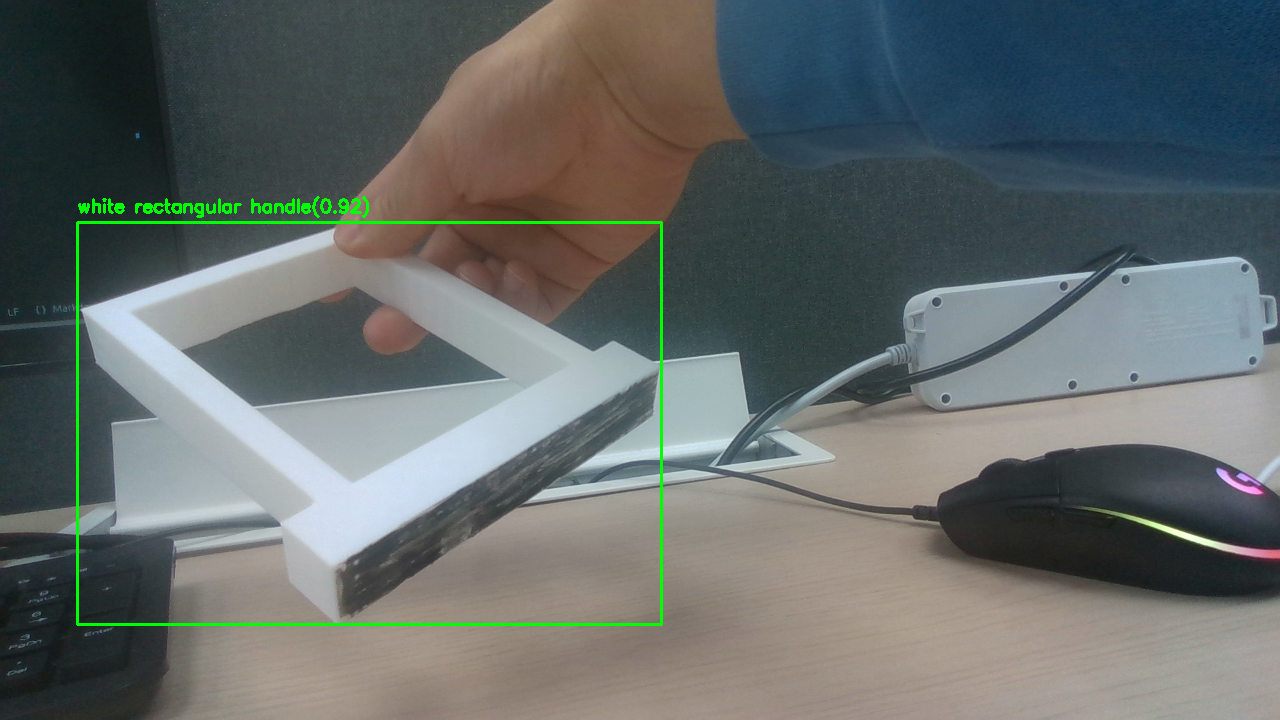
因为实际工程场景的数据采集、标注和泛化都比较麻烦,所以更偏向先尝试无样本路线。这样可以直接通过文本提示词锁定目标,再用分割模型切出目标区域。
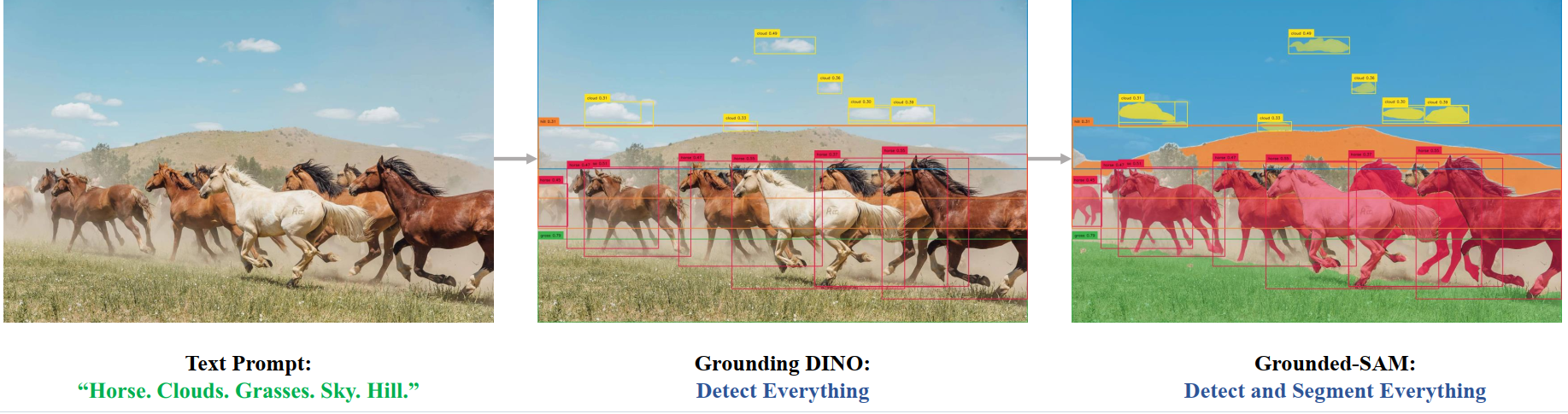
这里的思路就是:
- DINO 负责“找到目标”
- SAM 负责“把目标像素级分出来”
- 深度图负责“把 2D mask 变成 3D 点云”
7.3 Grounding DINO 的价值
DINO 这条线的价值在于:
- 不强依赖专门数据集
- 可以零样本目标检测
- 能通过语义提示词描述目标
这一点很适合“目标明确但数据少”的工程场景。

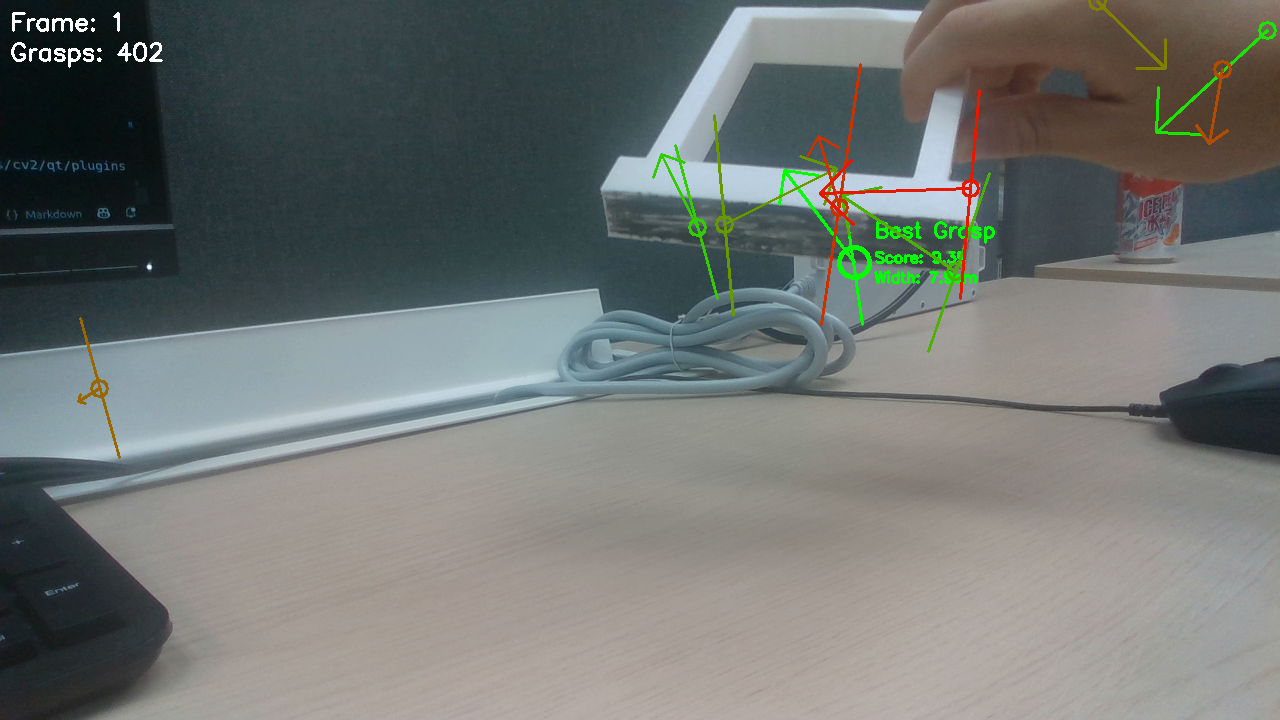
7.4 DINO + EconomicGrasp 的组合尝试
后面做过一条比较自然的组合路线:
- 先用 DINO 检测目标
- 再用检测结果去过滤或约束 EconomicGrasp 的抓取候选
这样就不再是“整图随便抓”,而是希望把抓取候选限制到目标物体上。
这条路线能一定程度上缓解“抓错物体”的问题,但还不能保证抓取面就是理想面。也就是说,它解决了“抓哪个物体”的一部分问题,却没有彻底解决“从哪个面抓”这个更核心的问题。
八、SAM 系列模型测试:不是只看精度,也要看部署和场景表现
在实际分割过程中,一个很现实的问题是:
- 背景和目标颜色接近
- 白色把手和浅色背景容易混淆
- 模型大小、推理速度和精度之间必须权衡
因此后面专门比较了:
- SAM ViT-H
- MobileSAM
- EfficientSAM
- EdgeSAM
- FastSAM
这里一个比较明确的结论是:
- SAM ViT-H 效果强,但模型大、速度慢
- EfficientSAM 在一些背景颜色分割上反而更实用
- EdgeSAM / MobileSAM 在速度上更适合边缘设备思路
也就是说,模型参数量小不一定代表整条推理链更快,瓶颈有时候出现在 decoder,而不只是 encoder。
项目里也做过一些实际测试,例如:
- DINO + SAM 的组合验证
- EfficientSAM 对目标分割的替代测试
- 比较不同 SAM 版本在速度和分割质量上的差别
这些测试最后并没有导向“选一个完美模型”,而是帮我更清楚地知道:
2D 分割只是入口,真正决定抓取得是否合理的,还是后面的 3D 几何处理和姿态筛选。
九、路线进一步收敛:从点云角度重新定义抓取面问题
通用 6D grasp 检测不够稳定之后,问题被重新表述成:
先把目标物体从图像里分离出来,再在目标点云里找“最适合抓”的那个平面。
这个思路虽然没有端到端那么“整齐”,但更符合当前项目需求。
对把手类目标来说,一个重要观察是:
- 最前端抓取面和周围面在法向上通常有明显差异
- 前后表面虽然可能法向类似,但空间位置不同
- 局部平面如果能稳定提出来,就能进一步计算抓取姿态
因此后面形成的处理思路大致是:
- 目标分割
- 深度图转点云
- 点云滤波 / 下采样
- 法向量估计
- 法向聚类 + 距离聚类
- RANSAC 平面拟合
- PCA 提取法向与主方向
- 输出抓取点和抓取姿态
这一步其实是项目里非常关键的转折点:
- 前面更多是在“找目标”
- 到这里开始真正进入“找抓取面”
十、平面提取与姿态估计:这部分是怎么一点点试出来的
10.1 为什么最后会是“法向聚类 + 距离聚类 + RANSAC + PCA”这套组合
这个组合基本是反复试出来的一条相对稳定路线:
- 法向量聚类:先按方向把不同面分开
- 距离聚类:进一步把前后法向相近但空间位置不同的面拆开
- RANSAC 平面拟合:过滤噪声,得到稳定平面
- PCA 主成分分析:提取平面主方向和法向量
这条路线的出发点其实很工程化:不用追求一步到位的神经网络解法,而是优先把一个“可调、可解释、可验证”的几何流程跑顺。
10.2 为什么后来又加入 UI 交互
后来项目里又加入了交互式 UI,这一步很关键。
因为即便算法已经能给出候选平面,真实场景里依然会遇到:
- 点云质量波动
- 遮挡
- 反光或水下图像退化
- 参数稍有变化就导致平面不稳定
所以实际做法不是完全“黑盒自动化”,而是先支持:
- 点云可视化
- 自由旋转视角
- 2D 框选目标区域
- 锁定视角后局部处理
- 在框选区域内进一步做深度过滤和几何拟合
这等于在鲁棒性和可控性之间取了一个平衡。
这部分也让我对工程项目里一个很现实的事实有了更直接的理解:
很多时候,比起追求完全自动化,一个“自动推荐 + 人工确认”的流程更容易真正落地。
十一、自动化升级:从纯人工交互到半自动推荐
后面一段时间里,比较核心的工作其实就是把原本重度依赖人工的流程,升级成自动推荐 + 人工确认的双模式系统。
11.1 自动化升级的核心问题
系统要想从“能跑”走向“好用”,至少要解决两个算法问题:
问题 1:如何让系统自动识别并对齐法向量?
解决思路是把相机视野方向 [0, 0, 1] 作为参考基准:
- 先对候选平面法向量做方向校正
- 再计算法向量与视野方向夹角
- 过滤掉偏转角过大、不适合正面抓取的平面
问题 2:如何剥离复杂背景并精准锁定抓取面?
这里形成的方案是:
- 深度过滤
- SOR 去噪
- RANSAC 迭代多平面拟合
- 多候选平面评分与择优
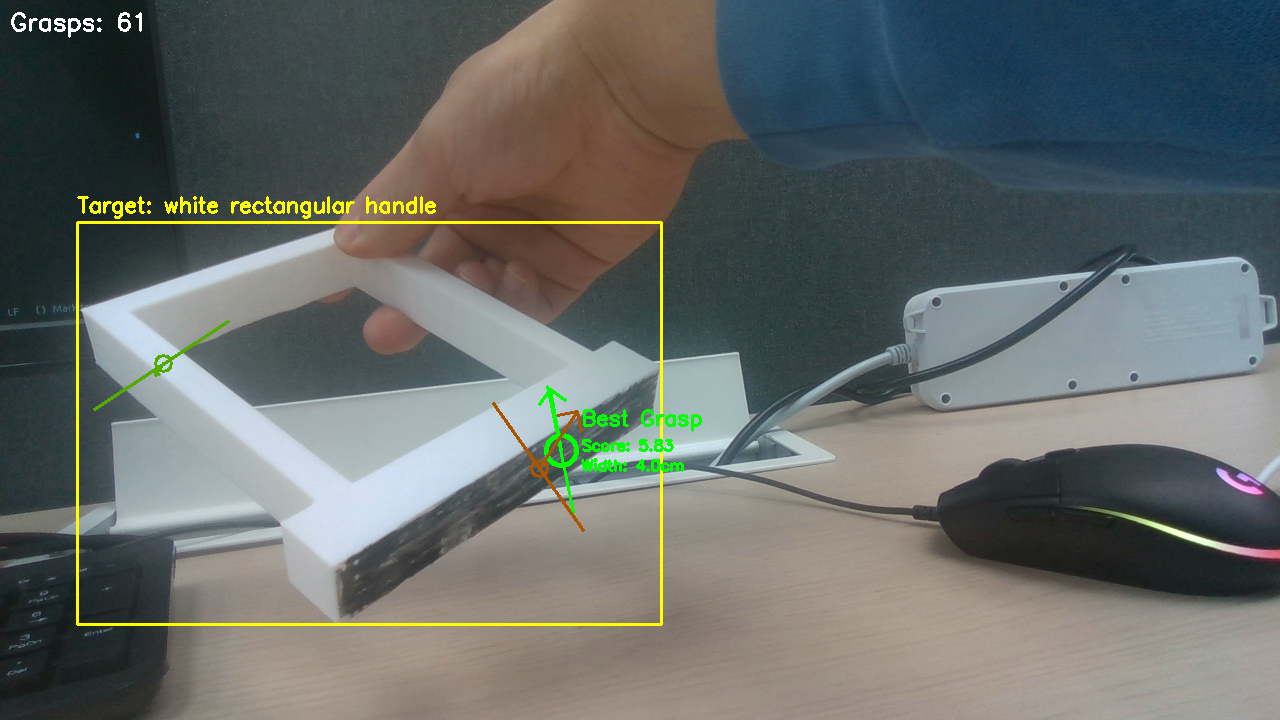
11.2 四维评分机制是怎么来的
为了从多个候选平面中自动选出“最值得抓的那个”,后来设计了一套四维评分机制:
- 前端性(40%):平面越靠近相机越优先
- 法向量一致性(30%):越符合抓取姿态越优先
- 平整度(20%):平面越稳定越优先
- 面积 / 点数(10%):剔除过小干扰面
这一步很重要,因为它相当于把“人工挑平面”的经验,尽量编码成了程序逻辑。
11.3 具体参数调优
在工程实现里,还调过一批关键参数,比如:
ransac_threshold = 0.002(2mm)ransac_n = 3ransac_iterations = 1000min_plane_points = 150
其中一个具体优化是把 RANSAC 内点距离阈值降到 2mm,避免拟合出明显偏斜的平面。
这类调参工作单看很碎,但它其实决定了系统是“经常出奇怪结果”,还是“在多数情况下都能给出一个可用候选”。
11.4 自动化带来的实际收益
这次自动化升级最直接的收益不只是“少点几下鼠标”,而是:
- 原本 1
3 分钟的人工操作流程,被压缩到 23 秒自动运行 - 自动结果不满意时,还能无缝退回交互模式
- 系统从“实验脚本”更接近“工程工具”
十二、实际踩坑:2D 分割、深度过滤和目标表面提取并没有想象中顺
如果只看最终结果,会觉得路线好像很自然,但实际中间有不少不顺的地方。
12.1 白色目标和背景白色混淆
这是一个很典型的问题:
- 2D 分割模型在颜色接近的场景下容易把背景和目标混在一起
- 对白色把手这类目标尤其明显
这里的处理思路包括:
- 比较不同 SAM 系列模型
- 引入深度图辅助过滤背景平面
- 把 2D mask 和深度信息结合起来做后处理
后面发现,单纯“先分割再直接用”通常不够,还是得配合深度和点云结构信息一起处理。
12.2 深度图里会有异常值
后面在尝试用深度图过滤背景时,又发现深度数据里会存在异常值。这一步提醒我:
- 深度信息不是天然可靠的
- 前景提取失败时,不一定是分割错了,也可能是深度本身有噪声和离群点
所以后面才会继续加入阈值、去噪和候选筛选,而不是只相信一张 mask。
12.3 RANSAC 找到的平面不一定是真正想要的抓取面
这也是一个很关键的认识。
RANSAC 更擅长找“拟合意义上最好的平面”,但这个平面不一定就是任务里最适合抓取的那一个。也正因为这样,后面才会:
- 做多平面提取
- 设计评分机制
- 再保留人工确认入口
所以整个系统后面的形态,其实是被这些实际问题一步步逼出来的。
十三、手眼标定与坐标变换:系统闭环里最容易被低估的部分
视觉侧求出抓取点和法向量之后,后面还有一道非常关键的门槛:手眼标定和坐标变换。
13.1 为什么这部分会卡很久
因为视觉里得到的抓取位姿往往是在:
- 相机坐标系
- 图像坐标系
- 点云局部坐标系
但机械臂真正执行时需要的是:
- 机械臂基底坐标系下的位姿
- 与控制接口一致的姿态表示
- 统一的欧拉角顺序或旋转矩阵表达
只要中间哪一步定义不一致,最后抓取就会明显偏掉。
13.2 实际踩过的坑
这个项目里实际踩到的典型问题包括:
- 夹爪物理方向和算法假设轴向不一致
- 欧拉角顺序不明确
- 是绕基底坐标旋转还是绕末端坐标旋转没有统一
- 手眼标定外参矩阵误差过大
- 仿真看起来正常,实际上机位置明显偏差
后面逐步确认下来的一些关键点包括:
- 夹爪对应方向实际是 Y 轴 而不是 X 轴
- 欧拉角顺序需要明确为 ZYX
- 手眼标定最终重新采用了更合适的 AX=XB 路线
13.3 水下标定问题带来的额外复杂度
周报里还记录了水下标定测试相关内容,这部分让我对“实验环境差异”有了很直接的体感。
水下视觉和普通陆地标定最大的不同在于:
- 折射会破坏理想线性成像模型
- 密封舱、玻璃界面、空气层都会引入额外变量
- 图像几何畸变和背景噪声会影响角点提取
所以水下双目标定、重投影误差和深度估计的稳定性,比最开始想象的复杂得多。
十四、工程重构:从“很多脚本”到“相对清晰的流程”
除了算法本身,实习期间还有一块很重要的工作是系统工程化。
14.1 标定模块重构
项目早期存在多套相互独立的标定脚本,例如:
- 单目眼在手上
- 单目眼在手外
- 双目眼在手外
这些脚本的参数、路径、调用方式都不统一,维护成本很高。后面做了一轮统一整理,包括:
- 标定结果文件命名规范化
- 路径自动映射
- 根据标定类型自动选择流程
- 执行入口统一
14.2 一键启动系统
原始流程往往需要:
- 手动开多个终端
- 分别运行 UDP 服务器、相机采集、平面提取、抓取执行
- 人工复制输入输出路径
后面把这些串成了一条流程:
- UDP 服务器
- 相机采集
- 平面提取
- 抓取执行
并加入:
- 后台进程管理
- 文件自动查找
- 路径自动传递
- 基础错误处理
14.3 文档建设
另一项很实际的工作是把原本分散在代码里的使用方式、路径和参数整理成文档,包括:
- 使用指南
- 模块级 README
- 常用命令参考
- 标定结果说明
这部分的意义在于:
- 新同学更容易接手
- 调试路径更清晰
- 系统从“只能作者自己运行”变成“别人也能跑”
十五、如果从“问题—尝试—调整—结果”来总结这段经历
我觉得这段项目最值得保留的,不是最后选了哪些方法,而是整条演化过程:
1. 最开始的设想
先用现成 6D 抓取模型,尽量少做后处理,直接输出抓取位姿。
2. 第一轮反馈
模型能给 grasp 候选,但抓的不是任务里真正想抓的那个面,目标导向能力不够。
3. 第一次调整
引入目标检测 / 分割,先解决“抓哪个物体”的问题,于是开始尝试 DINO、SAM 这条路线。
4. 第二轮反馈
目标能大致框出来,但“框出目标”不等于“得到理想抓取位姿”;2D 结果还需要进一步投到 3D 空间里处理。
5. 第二次调整
把重点转到点云局部几何分析上,用法向、聚类、RANSAC、PCA 去找最合适的抓取面。
6. 第三轮反馈
几何路线更可控,但在复杂场景里还是会受参数、噪声和候选平面选择影响。
7. 第三次调整
加入 UI 交互、深度过滤、多平面提取和评分机制,把流程从纯人工推进到半自动推荐。
8. 最后真正卡住系统闭环的地方
不是分割模型,也不是点云算法,而是手眼标定、姿态表示和机械臂坐标链路的一致性。
这个总结对我自己也挺重要,因为它让我更清楚地意识到:
真实机器人项目里,问题往往不是靠某一个模型一把梭解决的,而是靠不断缩小问题、拆分模块、重新定义路线,一点点把系统拼起来。
十六、结果与项目价值
这段实习里最直接的成果,并不是某一个单点指标,而是把一条原本比较分散的流程逐步跑通了。
从结果上看,至少实现了下面这些事情:
- 把目标检测、图像分割、点云处理、抓取位姿估计、手眼标定和机械臂执行串成了一条完整流程
- 将原本重度依赖人工的平面提取过程升级为“自动推荐 + 人工确认”的半自动化流程
- 将原来 1
3 分钟的人工处理流程压缩到 23 秒自动运行 - 对抓取系统中的标定、路径、启动流程和文档做了工程化整理,提高了系统可维护性和可交接性
如果从更大的角度看,这段工作的价值不只是“做了个 demo”,而是把一个机器人视觉项目从“单点算法尝试”往“可运行系统”推进了一大步。
十七、如果在面试里讲这段项目,我会怎么讲
如果把这段项目经历压缩成面试表达,我觉得比较合适的说法是:
这段实习里,参与的是一个机器人视觉抓取系统,不只是做单一算法,而是从目标识别、点云抓取面提取、姿态估计、手眼标定到机械臂执行链路都接触过。前期调研过通用 6D 抓取模型,但在实际场景里发现“能抓”和“抓得对”不是一回事,所以后面把路线改成了“目标检测 / 分割 + 点云几何分析”的组合方案。自己参与实现了目标点云上的平面提取、法向估计、RANSAC + PCA 姿态计算、平面自动评分,以及一部分手眼标定和系统自动化改造工作。最大的收获是更清楚地理解了机器人视觉项目里算法、坐标变换和工程实现是怎么真正串起来的。
这段表述比单纯列模型名更能体现:
- 做过真实项目
- 不只是看论文
- 能从问题出发调整路线
- 理解系统闭环而不是单模块实现
十八、这段实习里最核心的收获
回头看,这段经历最大的收获不是“学会了某个模型”,而是下面几件事:
1. 端到端模型不一定就是工程最优解
很多时候,真正落地的问题并不是“模型 AP 更高”,而是:
- 目标是不是特定对象
- 数据能不能采
- 模型能不能部署
- 结果是不是可解释
- 失败时能不能快速定位问题
2. 点云几何方法虽然朴素,但很有工程价值
法向量、聚类、RANSAC、PCA 这些方法听起来没有大模型那么显眼,但在受约束的工程场景里,往往更稳、更可控。
3. 手眼标定和坐标变换是系统能否闭环的关键
视觉做得再好,如果坐标链不对,最后机械臂还是抓不到。这个认知是通过很多次调试和踩坑才真正建立起来的。
4. 工程能力本身就是成果的一部分
一键启动、模块重构、自动化配置、文档整理,这些工作不一定体现在论文标题里,但它们直接决定了系统到底是“能演示一次”,还是“能长期维护和反复运行”。
十九、后续还值得继续做的方向
如果把这个项目继续往下推进,后面值得继续做的方向大致有:
- 更强的目标导向抓取模型
- 结合视觉、语言和抓取动作的多模态方法
- 更稳定的目标分割与 2D-3D 联动
- 解决遮挡、颜色混淆、深度异常值问题
- 更自动化的平面筛选与参数自适应
- 自动寻找更优深度阈值和评分参数
- 更严格的标定与误差建模
- 尤其是水下折射场景
- 边缘设备部署优化
- 针对 Jetson / NX 等板卡做轻量化与实时性优化
二十、总结
如果用一句话概括这段实习,我更愿意把它理解为:
在一个真实机器人视觉项目里,把“目标识别、点云处理、抓取位姿估计、手眼标定、系统自动化”这几条原本分散的链路,逐步拼接成了一个能实际运行的整体系统。
这段经历里既有模型调研,也有几何方法实现;既有坐标变换和手眼标定,也有 UI、自动化和文档重构。相比只停留在单点算法层面,这种完整链路上的参与,更能体现真实项目经验、问题分析能力和工程落地能力。